ODC/Dance
Michael McNabb, Sax & Electronics
Artis Wodehouse, Piano
ODC/Dance | Image: Gayle Curtis
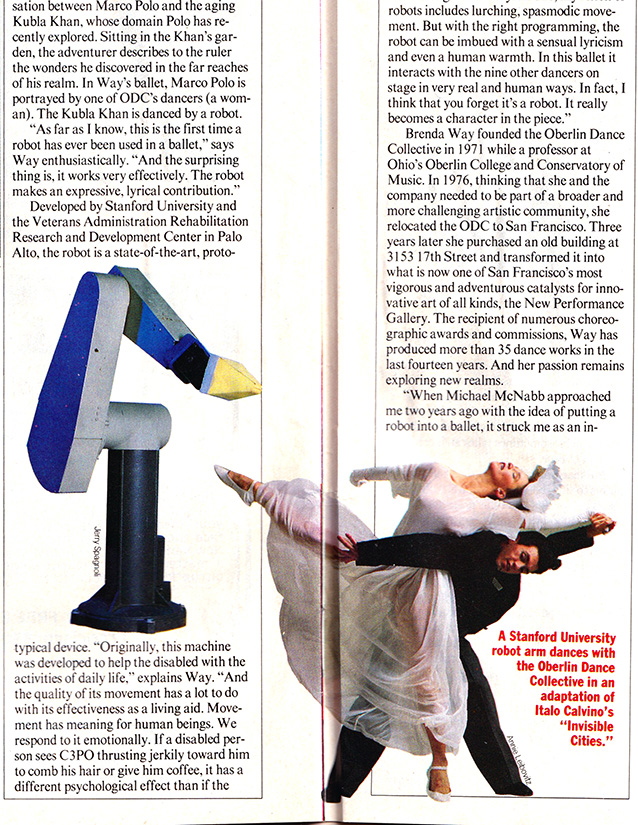
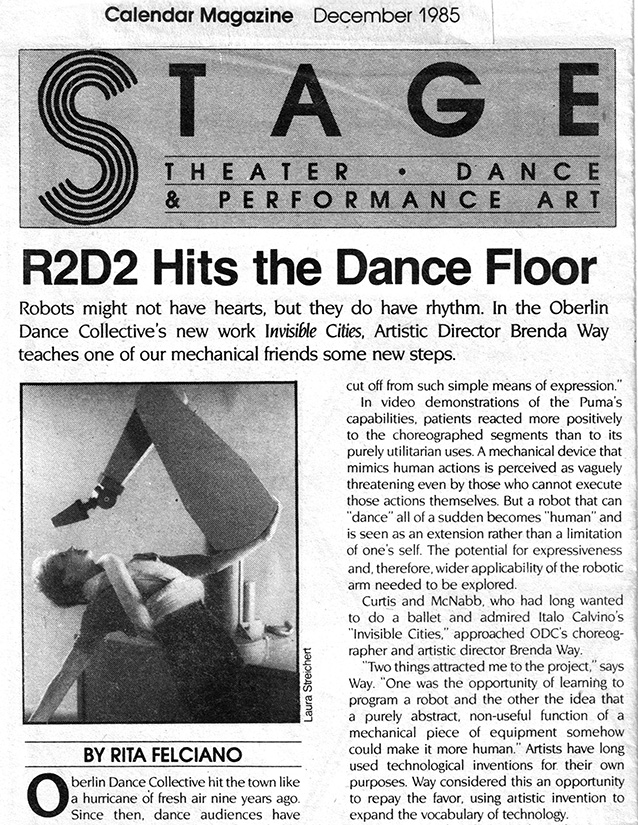
The first full-length ballet to feature a choreographed robotic dancer.
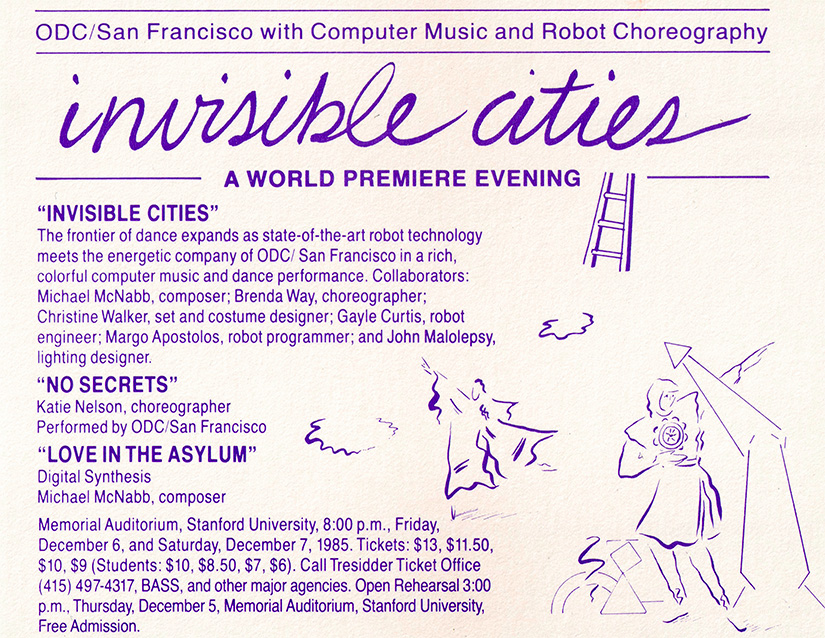
Invisible Cities was inspired by Italo Calvino's novel of the same name. Sensing the decline of his empire, the aged Kublai Khan summons the young foreigner Marco Polo to his garden,
to reassure him of the greatness of his realm. Marco Polo diverts the great Khan with tales of the cities he has seen within the empire.
As the barrier of their different languages is overcome, the image of the cities become increasingly vivid.
Kublai Khan searches for a pattern among them, concluding finally that each description is of the same place and all are within him.
World Premiere December 6 & 7, 1985 at Memorial Auditorium, Stanford University.
Additional performances August 1 & 2, 1986 at Zellerbach Hall, U.C. Berkeley
 Available on Wergo CD (WER 2015-50) and all streaming services
Available on Wergo CD (WER 2015-50) and all streaming services